If you've ever sat watching a
thunderstorm, with mighty lightning
bolts darting down from the sky, you'll have some idea of the power of
electricity.
A bolt of lightning is a sudden, massive surge of electricity between
the sky and the ground beneath. The energy in a single lightning bolt
is enough to light 100 powerful lamps for a whole day or to make
about twenty thousand slices of toast! [1]
Electricity is the most versatile energy
source that we have; it is also one of the newest: homes and businesses have been
using it for not much more than a hundred years. Electricity has played
a vital part of our past. But it could play a different role in our
future, with many more buildings generating their own renewable
electric power using solar cells and wind turbines. Let's take a closer
look at electricity and find out how it works!
Electricity is a type of energy that can build up in one place or
flow from one place to another. When electricity gathers in one place
it is known as static electricity (the word static means something that
does not move); electricity that moves from one place to another is
called current electricity.
Static electricity
Photo: Lightning happens when static electricity (built up in one place) turns to current electricity (flowing from one place to another).
Static electricity often happens when you
rub things together. If you rub a balloon against your pullover 20 or 30 times, you'll find the
balloon sticks to you. This happens because rubbing the balloon gives
it an electric charge (a small amount of electricity).
The charge makes it stick to your pullover like a
magnet, because your pullover gains an opposite electric charge. So your
pullover and the balloon attract one another like the opposite ends of
two magnets.
Have you ever walked across a nylon rug or carpet and felt a slight
tingling sensation? Then touched something metal, like a door knob or a
faucet (tap), and felt a sharp pain in your hand? That is an example of an
electric shock. When you walk across the rug, your feet are rubbing
against it. Your body gradually builds up an electric charge, which is
the tingling you can sense. When you touch metal, the charge runs
instantly to Earth—and that's the shock you feel.
Lightning is also caused by static electricity. As rain clouds
move through the sky, ice crystals inside them sink to the bottom,
while water droplets rise to the top. The crystals have one kind
of charge (negative) while the water droplets have the other kind (positive).
It's the separation of these charges that allows a cloud to build up its power.
Eventually, when the charge is big enough, it leaps to Earth as a bolt of lightning. You can often
feel the tingling in the air when a storm is brewing nearby. This is
the electricity in the air around you. Read more about this in
our article on capacitors.
Sponsored links
How static electricity works
Electricity is caused by electrons, the tiny particles that "orbit"
around the edges of atoms, from which everything is made. Each electron
has a small negative charge. An atom normally has an equal number of
electrons and protons (positively charged particles in its nucleus or
center), so atoms have no overall electrical charge. A piece of rubber
is made from large collections of atoms called molecules. Since the
atoms have no electrical charge, the molecules have no charge either—and nor does the rubber.
Suppose you rub a balloon on your pullover over and over again. As you
move the balloon back and forward, you give it energy. The energy from
your hand makes the balloon move. As it rubs against the wool in your
pullover, some of the electrons in the rubber molecules are pulled free
and gather on your body. This leaves the balloon with slightly too few
electrons. Since electrons are negatively charged, having too few
electrons makes the balloon slightly positively charged. Your pullover
meanwhile gains these extra electrons and becomes negatively charged.
Your pullover is negatively charged, and the balloon is positively
charged. Opposite charges attract, so your pullover sticks to the balloon.
That's a very brief introduction to static electricity. You'll find much more
about it (and why it's caused by something called triboelectricity)
in our main article on static electricity.
Photo: A classic demonstration of static
electricity you may have seen in your school. When you touch
the metal ball of a Van de Graaff static electricity generator, you
receive a huge electric charge and your hair literally stands on end! Each strand of hair gets the same
static charge and like charges repel, so the hairs push away from one
another. In a bit more detail: the Van de Graaff ball builds up a huge positive charge.
This "sucks" electrons (e) out of your body, and from the hairs in your head,
leaving each clump of hair with a positive charge that repels the other hairs.
Find out how a Van de Graaff Generator works.
Current electricity
When electrons move, they carry electrical energy from one place to
another. This is called current electricity
or an electric
current. A lightning bolt is one example of an electric current,
although it does not last very long. Electric currents are also
involved in powering all the electrical appliances that you use, from
washing machines to flashlights and
from telephones to MP3 players.
These electric currents last much longer.
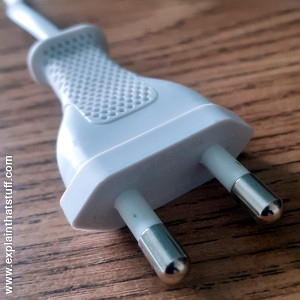
Photo: Appliances use wires (cables) like this to carry electric current around inside them. The electricity travels through the brown-colored copper metal on the inside. The blue plastic coating
on the outside protects you from the current if you touch the wire. It also stops two wires making electrical "contact" if they happen to touch.
Have you heard of the terms potential energy and kinetic energy?
Potential energy means energy that is stored somehow for use in the
future. A car at the top of a hill has potential energy, because it has
the potential (or ability) to roll down the hill in future. When it's
rolling down the hill, its potential energy is gradually converted into
kinetic energy (the energy something has because it's moving).
You can read more about this in our article on energy.
Static electricity and current electricity are like potential energy
and kinetic energy. When electricity gathers in one place, it has the
potential to do something in the future. Electricity stored in a
battery is an example of electrical
potential energy. You can use the
energy in the battery to power a flashlight, for example. When you
switch on a flashlight, the battery inside begins to supply electrical
energy to the lamp, making it give off light. All the time the light is
switched on, energy is flowing from the battery to the lamp. Over
time, the energy stored in the battery is gradually turned into light
(and heat) in the lamp. This is why the battery runs flat.
Picture: A battery like this stores electrical potential energy
in a chemical form. When the battery is flat, it means you've used up all the stored energy inside by converting it into other forms.
Electric circuits
For an electric current to happen, there must be a circuit.
A circuit is a closed path or loop around which an electric current
flows. A circuit is usually made by linking electrical components
together with pieces of wire cable. Thus, in a flashlight, there is a
simple circuit with a switch, a lamp, and a battery linked together by
a few short pieces of copper wire. When you turn the switch on,
electricity flows around the circuit. If there is a break anywhere in
the circuit, electricity cannot flow. If one of the wires is broken,
for example, the lamp will not light. Similarly, if the switch is
turned off, no electricity can flow. This is why a switch is
sometimes called a circuit breaker.
You don't always need wires to make a circuit, however. There is a
circuit formed between a storm cloud and the Earth by the air in
between. Normally air does not conduct electricity. However, if there
is a big enough electrical charge in the cloud, it can create charged
particles in the air called ions
(atoms that have lost or gained some
electrons). The ions work like an invisible cable linking the cloud
above and the air below. Lightning flows through the air between the
ions.
How electricity moves in a circuit
Materials such as copper metal that conduct electricity (allow it
to flow freely) are called conductors.
Materials that don't
allow electricity to pass through them so readily, such as
rubber and
plastic, are called insulators.
What makes copper a conductor and rubber an insulator?
A current of electricity is a steady flow of electrons. When
electrons move from one place to another, round a circuit, they carry
electrical energy from place to place like marching ants carrying
leaves. Instead of carrying leaves, electrons carry a tiny amount of
electric charge.
Electricity can travel through something when its structure allows
electrons to move through it easily. Metals like copper have "free"
electrons that are not bound tightly to their parent atoms. These
electrons flow freely throughout the structure of copper and this is
what enables an electric current to flow. In rubber, the electrons are
more tightly bound. There are no "free" electrons and, as a result,
electricity does not really flow through rubber at all. Conductors that
let electricity flow freely are said to have a high conductance
and a low resistance; insulators that do not
allow electricity
to flow are the opposite: they have a low conductance and a high
resistance.
For electricity to flow, there has to be something to push the
electrons along. This is called an electromotive
force (EMF). A battery or power outlet creates the electromotive force that makes a
current of electrons flow. An electromotive force is better known as a voltage.
Direct current and alternating current
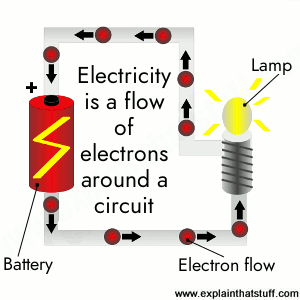
Electricity can move around a circuit in two different ways. In the big picture up above, you can
see electrons racing around a loop like race cars on a track, always going in the same direction.
This type of electricity is called direct current (DC) and most toys and small gadgets
have circuits that work this way.
Artwork: Top: In a direct current (DC) circuit, electrons always flow in the same direction.
Bottom: In an alternating current (AC) circuit, the electrons reverse direction many times each second.
The bigger appliances in your home use a different kind of electricity called
alternating current (AC).
Instead of always flowing the same way, the electrons constantly reverse direction—about 50–60
times every second. Although you might think that makes it impossible for energy to be carried round a circuit,
it doesn't! Take the flashlight bulb in the circuit above. With direct current, new electrons keep streaming
through the filament (a thin piece of wire inside the bulb), making it heat up and give off light.
With alternating current, the same old electrons whiz back and forth in the filament.
You can think of them running on the spot, heating up the filament so it still makes bright light we can see.
So both types of current can make the lamp work even though they flow in different ways.
Most other electric appliances can also work using either direct or alternating current,
though some circuits do need AC to be changed to DC (or vice versa) to work correctly.
Sponsored links
Electromagnetism
Electricity and magnetism are closely related.
You might have seen giant steel electromagnets working in a scrapyard.
An electromagnet is a
magnet that can be switched on and off with electricity.
When the current flows, it works like a magnet; when the current stops,
it goes
back to being an ordinary, unmagnetized piece of steel. Scrapyard
cranes pick up bits of metal junk by switching the magnet on. To
release the junk, they switch the magnet off again.
Artwork: A simple electromagnet made from a battery and some wire coiled around an iron bar. This turns the bar into an "invisible" bar magnet with a north pole and a south pole at either end.
Electromagnets show that electricity can make magnetism, but how do
they work? When electricity flows through a wire, it creates an
invisible pattern
of magnetism all around it. If you put a compass needle near an
electric cable, and switch the electricity on or off, you can see the
needle move
because of the magnetism the cable
generates.
The magnetism is caused by the changing electricity when you switch the
current on or off.
This is how an electric motor works. An
electric motor is a
machine that turns electricity into mechanical energy. In other words,
electric power makes the motor spin around—and the motor can drive
machinery. In a clothes washing machine, an electric motor spins the drum; in
an electric drill, an electric motor makes the drill bit spin at high
speed
and bite into the material you're drilling. An electric motor is a
cylinder packed with magnets around its edge. In the middle, there's a
core made of iron wire wrapped around many times. When electricity
flows into the iron core, it creates magnetism. The magnetism created
in the core pushes against the magnetism in the outer cylinder and
makes the core of the motor spin around. Read more in our
main article on electric motors.
Make an electromagnet
Picture: Why not make an electromagnet? All you need is a few common household items.
You can make a small electromagnet using a
battery, some insulated (plastic-covered) copper wire, and a nail.
Here are a couple of websites that tell you what to do step-by-step:
Just as electricity can make magnetism, so magnetism can make
electricity. A dynamo is a bit like
an electric motor inside. When you pedal your bicycle, the dynamo clipped to the wheel
spins around. Inside the dynamo, there is a heavy core made from iron
wire
wrapped tightly around—much like the inside of a motor. The core spins
freely inside
some large fixed magnets. As you pedal, the core
rotates inside these outer magnets and generates electricity. The
electricity flows out from the dynamo and powers your bicycle lamp.
The electric generators
used in power plants work in exactly
the same way, only on a much bigger scale. Instead of being powered by
someone's legs, pedaling furiously, these large generators are driven
by steam. The steam is made by burning fuels or by nuclear reactions.
Power plants can make enormous amounts of electricity, but they waste
quite a lot of the energy they produce. The energy has to flow from the
plant, where it is made, to the homes, offices, and factories where it
is used down many miles of electric power cable. Making electricity
in a power plant and delivering it to a distant building can waste up to two thirds of the energy
that was originally present in the fuel!
Another problem with power plants is that they make electricity by
burning "fossil fuels" such as coal, gas, or oil. This creates
pollution and adds to the problem known as global warming (the way
Earth is steadily heating up because of the energy people are using).
Another problem with fossil fuels is
that supplies are limited and they are steadily running out.
Photo: Making clean, renewable energy from the wind. Each wind turbine contains an electricity generator in the top section, just behind the spinning rotors. In this turbine, the rotors are on the left and the generator is the ribbed cylinder on the right. Photo by Joe Smith courtesy of
National Renewable Energy Laboratory (NREL).
There are other ways to make energy that are more efficient, less
polluting, and do not contribute to global warming. These types of
energy
are called renewable, because they can last indefinitely. Examples of
renewable energy include wind turbines and
solar power. Unlike huge
electric power plants, they are often much more efficient ways of
making electricity. Because they can be sited closer to where the
electricity is used, less energy is wasted transmitting power down the
wires.
Wind turbines are effectively just electric generators with a
"propeller" on the front. The wind turns the propeller, which spins the
generator inside, and makes a study current of electricity.
Unlike virtually every other way of making electricity, solar
cells (like the ones on calculators and digital watches) do not
work using electricity generators and magnetism. When light falls on a
solar cell, the material it is made from (silicon) captures the light's
energy and turns it directly into electricity. Potentially, this means
solar cells are an extremely efficient way to make electricity. A home
with solar electric panels on the roof might be able to make most of
its own electricity, for example.
Electricity and electronics
Photo: A transistor (a typical electronic component) on a circuit board. Components
like this run on electricity, just like clothes washing machines, but they use much smaller currents and
voltages.
Electricity is about using relatively large currents of electrical
energy to do useful jobs, like driving a washing machine or powering an
electric drill. Electronics is a very different kind of electricity.
It's a way of controlling things using incredibly tiny currents of
electricity—sometimes even individual electrons! Suppose you have an
electronic clothes washing machine. Large currents of electricity come from the
power outlet (mains supply) to make the drum rotate and heat the water.
Smaller currents of electricity operate the electronic components in
the washing machine's programmer unit. These tiny currents control the
bigger currents, making the drum rotate back and forth, starting and
stopping the water supply, and so on.
Read more in our main article on electronics.
The power of electricity
Before the invention of electricity, people had to make
energy wherever and whenever they needed it. Thus, they had to make
wood or coal
fires to heat their homes or cook food. The invention of electricity
changed all that. It meant energy could be made in one place then
supplied over long distances to wherever it was needed. People no
longer had to worry about making energy for heating or cooking: all
they had to do was plug in and switch on—and the energy was there as
soon as they wanted it.
Another good thing about electricity is that it's like a common
"language" that all modern appliances can "speak." You can run a car
using the energy in gasoline, or you can cook food on a barbecue in
your garden using charcoal, though you can't run your car on charcoal
or cook food with gasoline. But electricity is quite different. You can
cook with it, run cars on it, heat your home with it, and charge your
cellphone with it. This is the great beauty and the power of
electricity: it's energy for everyone, everywhere, and always.
Sponsored links
Measuring electricity
We can measure electricity in a number
of different ways, but a few measurements are particularly important.
Photo: You can use a digital multimeter like this to measure voltage, current, and resistance.
Here I'm measuring the voltage of a battery, which the display tells me is 1.31 volts.
Voltage
The voltage is a
kind of electrical force that makes electricity move through a wire
and we measure it in volts. The bigger the voltage, the more
current will tend to flow. So a 12-volt car battery will
generally produce more current than a 1.5-volt flashlight
battery.
Current
Voltage does not, itself, go anywhere: it's quite wrong to
talk about voltage "flowing through" things. What moves through
the wire in a circuit is electrical current:
a steady flow of
electrons, measured in amperes (or amps).
Power
Together, voltage and
current give you electrical power. The
bigger the voltage and
the bigger the current, the more electrical power you have. We
measure electric power in units called watts. Something that
uses 1 watt uses 1 joule of energy each second.
The electric power in a circuit is equal to the voltage × the
current (in other words: watts = volts × amps). So if you have a
100-watt (100 W) light and you know your electricity supply is rated as 120
volts (typical household voltage in the United States), the current
flowing must be 100/120 = 0.8 amps.
If you're in Europe, your household voltage is more likely 230 volts. So if you
use the same 100-watt light, the current
flowing is 100/230 = 0.4 amps. The light burns just
as brightly in both countries and uses the same amount of power
in each case; in Europe it uses a higher voltage and lower current;
in the States, there's a lower voltage and higher current.
(One quick note: 120 volts and 230 volts are the "nominal" or standard household
voltages—the voltages you're supposed to have, in theory. In practice, your home might
have more or less voltage than this, for all sorts of reasons, but mainly because of
how far you are from your local power plant or power supply.)
Energy
Power is a measurement of how much energy you're using each second. To
find out the total amount of energy an electric appliance uses, you have to multiply
the power it uses per second by the total number of seconds you use it for. The result you get is measured
in units of power × time, often converted into a standard unit called the kilowatt hour (kWh).
If you used an electric toaster rated at 1000 watts (1 kilowatt) for a whole hour, you'd use 1 kilowatt hour of energy;
you'd use the same amount of energy burning a 2000 watt toaster for 0.5 hours or a 100-watt lamp for 10 hours. See how it works?
Electricity meters (like the one shown in the photo above, from my house) show the total
number of kilowatt hours of electricity you've used.
1 kilowatt hour is equal to 3.6 million joules (J) of energy (or 3.6 megajoules if you prefer).
You can measure your energy consumption automatically with an energy monitor.
A brief history of electricity
Picture: Nikola Tesla (1856–1943) pioneered the alternating current power system most of us use today. Even so, his rival, Thomas Edison (1846–1931), is still popularly remembered as the inventor who gave the world electric power. Photograph by Sarony; engraving by T. Johnson, c.1906, courtesy of US Library of Congress.
1600 CE: English scientist William Gilbert (1544–1603)
was the first person to use the word "electricity." He believed electricity was caused by a moving fluid called humor.
1733: French scientist Charles du Fay (1698–1739) found
that there were two different kinds of static electric charge.
1752: American printer, journalist, scientist, and statesman Benjamin
Franklin (1706–1790) carried out further experiments and named the two kinds of electric charge "positive" and "negative."
1780: Italian biologist Luigi Galvani (1737–1798) touched
two pieces of metal to a dead frog's leg and made it jump. This led him to
believe electricity is made inside animals' bodies.
1785: French scientist Charles Augustin de Coulomb (1736–1806) explored the mysteries of electric fields:
the electrically active areas around electric charges.
1800: One of Galvani's friends, an Italian physics professor named Alessandro Volta (1745–1827), realized
"animal electricity" was made by the metals Galvani had used. After further research, he found out how to make electricity by joining
different metals together and invented batteries.
1827: German physicist Georg Ohm (1789–1854) found some materials carry electricity better than others and developed the idea of resistance.
1820: Danish physicist Hans Christian Oersted (1777–1851)
put a compass near an electric cable and discovered that electricity
can make magnetism.
1821: A French physicist called Andre-Marie Ampère
(1775–1836) put two electric cables near to one another, wired them up to a power source, and watched them push one another apart. This showed electricity and magnetism can work together to make a force.
1821: Michael Faraday (1791–1867), an English chemist and
physicist, developed the first, primitive electric motor.
1830s: American physicist Joseph Henry (1797–1879) and
British inventor William Sturgeon (1783–1850) independently made the first practical electromagnets and electric motors.
1831: Building on his earlier discoveries, Michael Faraday invented the electric generator.
1840: Scottish physicist James Prescott Joule
(1818–1889) proved that electricity is a kind of energy.
1870s: Belgian engineer Zénobe Gramme (1826–1901) made the
first large-scale electric generators.
1873: James Clerk Maxwell (1831–1879), another British physicist, set out a detailed theory of
electromagnetism (how electricity and magnetism work together).
1881: The world's first experimental electric power plant opened in Godalming, England.
1882: Thomas Edison (1846–1931) built the first large-scale electric power plants in the USA.
1890s: Edison's former employee Nikola Tesla (1856–1943) promoted alternating current (AC) electricity, a rival to the direct current (DC) system promoted by Edison. Edison and Tesla battled for supremacy and, although Edison is remembered as the pioneer of electric power, it was Tesla's AC system that ultimately triumphed.
DON'T ever play with electricity!
Electricity is amazingly useful—but it can be really dangerous as well.
When electricity zaps from power plants to your home, it's at thousands of
times higher voltages and massively more dangerous than the electricity in your home.
If you are silly enough
to touch or play near power equipment, you could
die an extremely nasty and unpleasant death—electricity doesn't
just shock you, it burns you alive. Heed warnings like this one and stay well away.
Electricity can also be dangerous in your home. Household electric power can kill you, so be sure to treat it with respect too.
Don't play with household power sockets or push things into them.
Don't take apart electrical appliances, because dangerous voltages can linger
inside for a long time after they are switched off.
If you want to know what something electrical looks like inside, search
on the web—you'll find a safe answer that way.
It's generally okay to use small (1.5 volt) flashlight batteries
for your experiments if you want to learn about electricity; they make small and safe voltages and
electric currents that will do you no harm. Ask an adult for advice if you're not sure what's safe.
Sponsored links
Don't want to read our articles? Try listening instead
Electricity (Science in a Flash) by Georgia Amson-Bradshaw. Hachette/Franklin Watts, 2017/2018. A clearly written 32-page guide for ages 7–9, with some basic hands-on activities and a helpful glossary.
Eyewitness: Electricity by Steve Parker. Dorling Kindersley, 2005. A classic glossy Eyewitness book that blends facts and history. Also worth
investing in the same series: Eyewitness: Electronics by Roger Bridgman. Dorling Kindersley, 2007. This one takes a similar approach but covers electronics and electronic components.
Charged Up: The Story of Electricity by Jackie Bailey and Matthew Lilly. Picture Window Books/A & C Black, 2004. A humorous, cartoon-style tour through the history of electricity. (For some reason, it's also published under the title "Charging About.")
For older children (ages 10+)
MAKE Electronics by Charles Platt. O'Reilly, 2015. A great hands-on guide to learning about electronic components and circuits.
Electronic Gadgets for the Evil Genius by Roger Iannini. McGraw-Hill Education, 2013. There are quite a few "Evil Genius" books in this series that will appeal to budding young hackers keen to experiment with more advanced circuits.
Children's books by me
Scientific Pathways: Electricity by Chris Woodford. Rosen, 2013: A simple introduction to the history of electricity, from the ancient Greeks to modern times. This book aims to show how science and technology progresses from one discovery to the next, a bit like a relay race, through the work of many different people. (This is an updated version of a book originally published by Blackbirch in 2004 under the series title Routes of Science.)
↑ Calculations: A typical lightning bolt might release about 500–1000 megajoules (500–1000 million joules) of energy. A powerful, old-fashioned incandescent lamp uses 100 watts (100 joules per second). One lamp lit for 24 hours uses 24 hours × 3600 seconds × 100 joules/second = 8,640,000 joules or 8.6 megajoules. So 100 of these lamps would use 860 megajoules. If you're using energy-saving lamps, you could light up 5–10 more. What about toasters? Suppose your toaster uses 1000 watts (1000 joules per second) and takes 2 minutes to make two pieces of toast. There are 120 seconds in two minutes, so your toaster needs 1000 × 120 = 120,000 joules of energy for two pieces or 60,000 joules per piece. Dividing our 1000 million joule lightning bolt by 60,000, we get about 17,000.
Please do NOT copy our articles onto blogs and other websites
Articles from this website are registered at the US Copyright Office. Copying or otherwise using registered works without permission, removing this or other copyright notices, and/or infringing related rights could make you liable to severe civil or criminal penalties.